SentinelQ
Hybrid edge-cloud surveillance system with multi-camera ingestion, adaptive local vs cloud inference, operator-facing web tooling, and LLM-assisted threat summaries.

SentinelQ
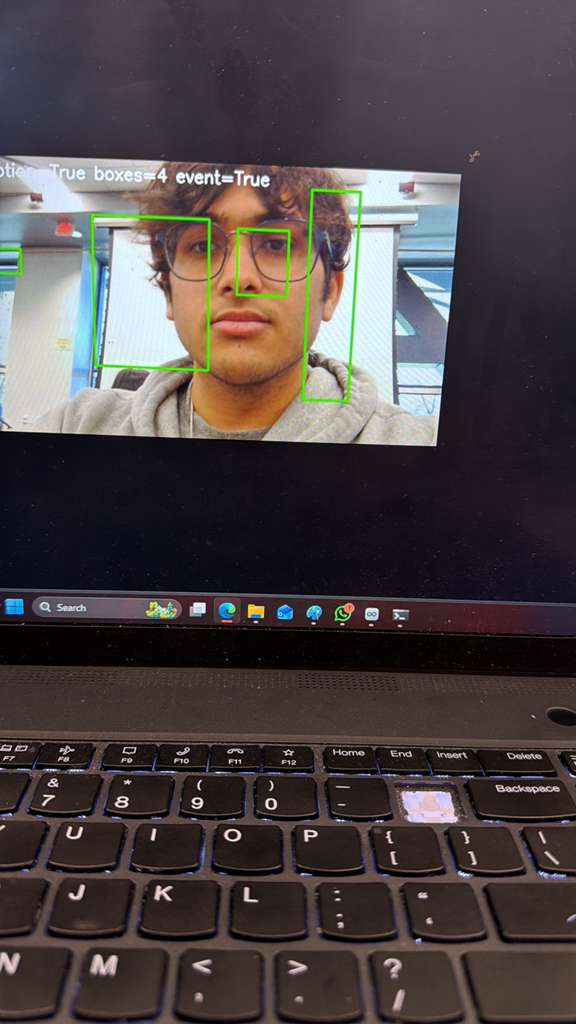
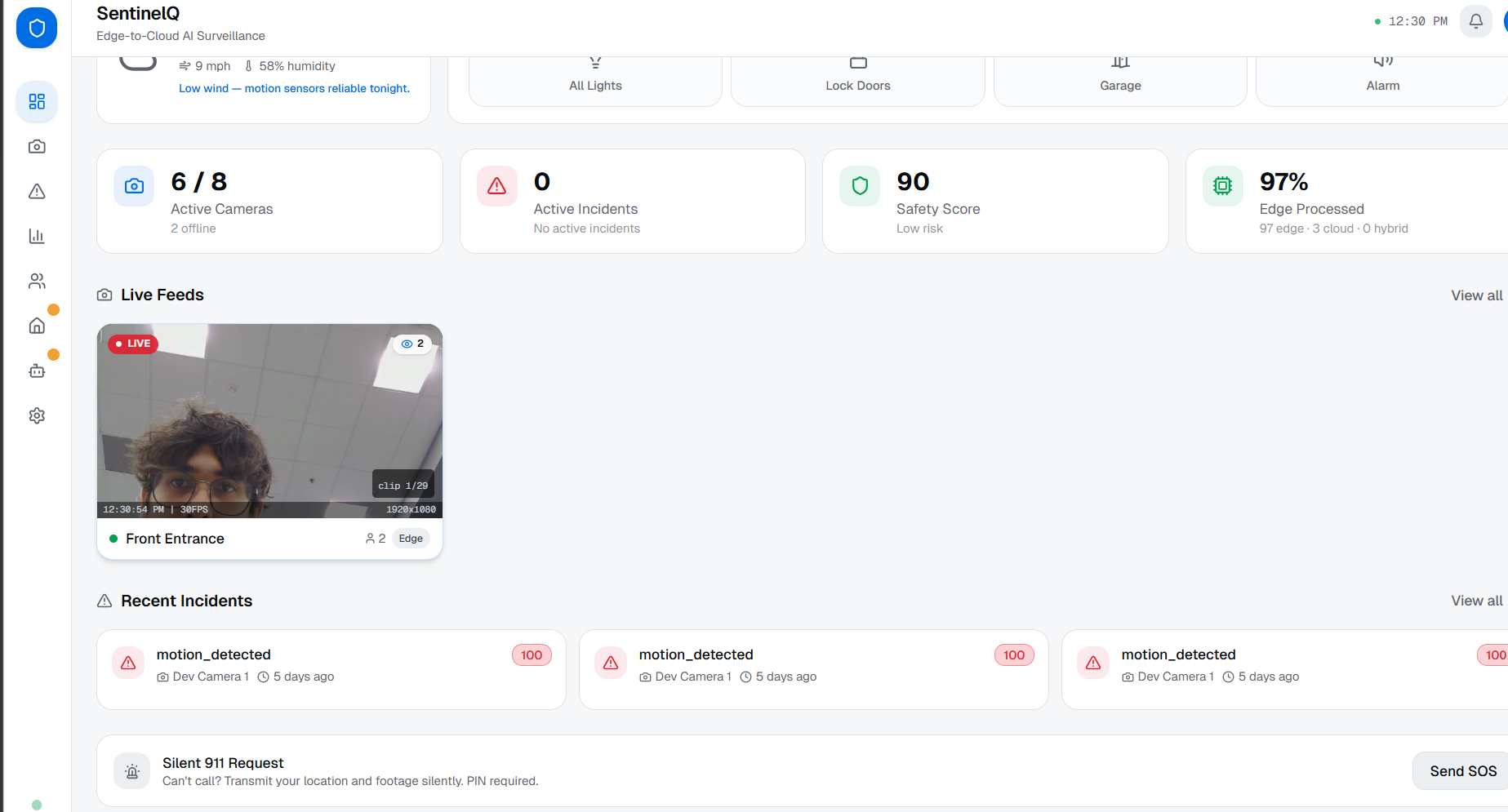
SentinelQ is a hybrid edge-cloud home surveillance platform built at IrvineHacks on Qualcomm Arduino UNO Q hardware. The system ingests multiple live camera streams, performs on-device detection and incident handling, and selectively routes more complex cases to the cloud for deeper analysis. Beyond the core inference path, the project includes a full-stack product surface with a Next.js frontend, FastAPI backend, PostgreSQL via Supabase, an on-device HTTP debug endpoint for live feed and runtime metrics, and an LLM-powered control assistant for text-command threat summaries. The overall design emphasizes practical deployment constraints such as bandwidth, latency, connectivity, and debuggability rather than assuming unlimited cloud access.
Conventional surveillance systems often force an all-local or all-cloud tradeoff. SentinelQ explores a more practical middle ground: responsive on-device handling for speed and bandwidth efficiency, paired with selective cloud escalation for higher-quality analysis and a usable end-to-end operator experience.